
مارمولک الهام بخش دست رباتیک شد!
خبرگزاری مهر
به گزارش خبرگزاری مهر به نقل از نیواطلس، دست های رباتیک به طور معمول ۲ گروه هستند که برخی از آنها اشیا را محکم کنترل می کنند و برخی دیگر اشیای ظریف را بسیار سبک کنترل می کنند. درهمین راستا یک دست رباتیک کشاورزی با الهام از مارمولک ساخته شده که هر دو قابلیت مذکور را دارد.
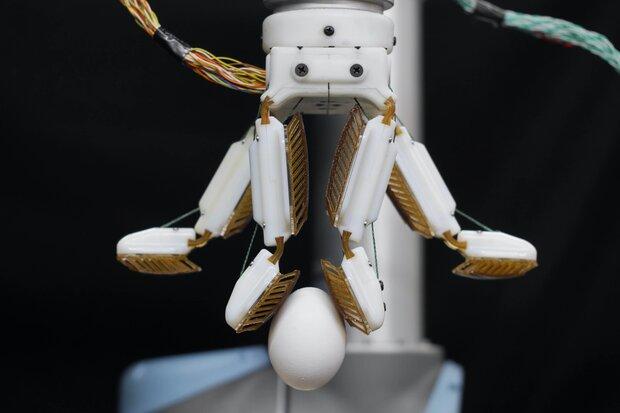
۳ مهندس دانشگاه استنفورد ربات مذکور را برای کنترل طیف وسیعی از اشیا ابداع کرده اند که ۴ انگشت دارد. این انگشتان می توانند با کمک چند تاندون داخلی دور شی را احاطه کنند. در هریک از بندهای انگشت پد الاستومری وجود دارد که با توجه به پاهای مارمولک مدلسازی شده تا بتواند اشیای ظریف مانند گوجه فرنگی را بدون ایجاد فشار زیادی کنترل کند.
پاهای مارمولک با کمک میلیون ها برجستگی میکروسکوپی و مو مانند به سطوح مختلف می چسبند. این پیوند موقت با سطح در مقیاس مولکولی انجام می شود که به نیروهای واندروالسی مشهور هستند. معمولاً نیروهای بین مولکولی به نام نیروهای واندروالسی مشهور هستند. هنگامی که حیوان پای خود را به جلو می برد این پیوند شکسته می شود.
در رباتی که به تازگی ساخته شده در پدهای به کار رفته در انگشتان به جای برجستگی های مو مانند، باله های میکروسکوپی وجود دارد که نه تنها با سطح پیوند مولکولی ایجاد می کنند بلکه حتی پس از شکسته شدن پیوند، هیچ نشانی از بقایای چسب باقی نمی ماند.
برای آنکه پدهای مذکور به سطوح خمیده بچسبند، باید ساختاری شبیه دنده داشته باشند که حتی با فشاری اندک، شی را کنترل کند. پد با کمک این تنظیمات به سطوح غیر مسطح می چسبد و به این ترتیب احتمال آسیب به شی یا سرخوردن از دست کاهش می یابد.
دست رباتیک در تست هایی که تاکنون انجام شده، اشیایی بسیار ظریف مانند انگور و تخم مرغ خام را کنترل کرد و علاوه بر آن توانست اشیای سنگین تر مانند توپ بسکتبال را نیز نگه دارد.
منبع خبر: خبرگزاری مهر ![]()
اخبار مرتبط: مارمولک الهام بخش دست رباتیک شد!
حق کپی © ۲۰۰۱-۲۰۲۴ - Sarkhat.com - درباره سرخط - آرشیو اخبار - جدول لیگ برتر ایران